07. MCL in Action
MCL in Action
MCL vs EKF in Action
1- MCL:
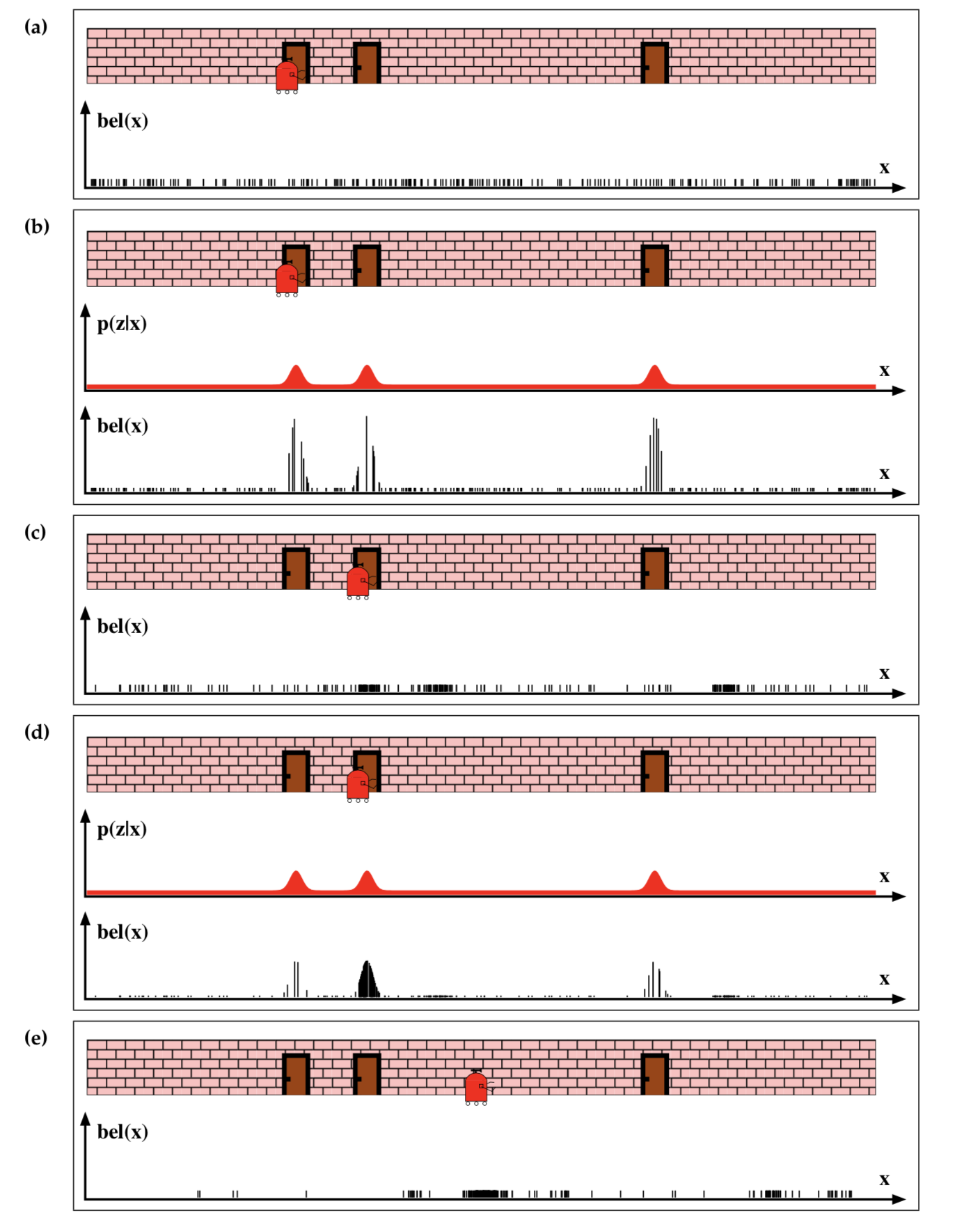
Source: Thrun, 2005 - Probabilistic Robotics
At time :
- t=1 , Particles are drawn randomly and uniformly over the entire pose space.
- t=2 , Measurement is updated and an importance weight is assigned to each particle.
- t=3 , Motion is updated and a new particle set with uniform weights and high number of particles around the three most likely places is obtained in resampling.
- t=4 , Measurement assigns non-uniform weight to the particle set.
- t=5 , Motion is updated and a new resampling step is about to start.
2- EKF:
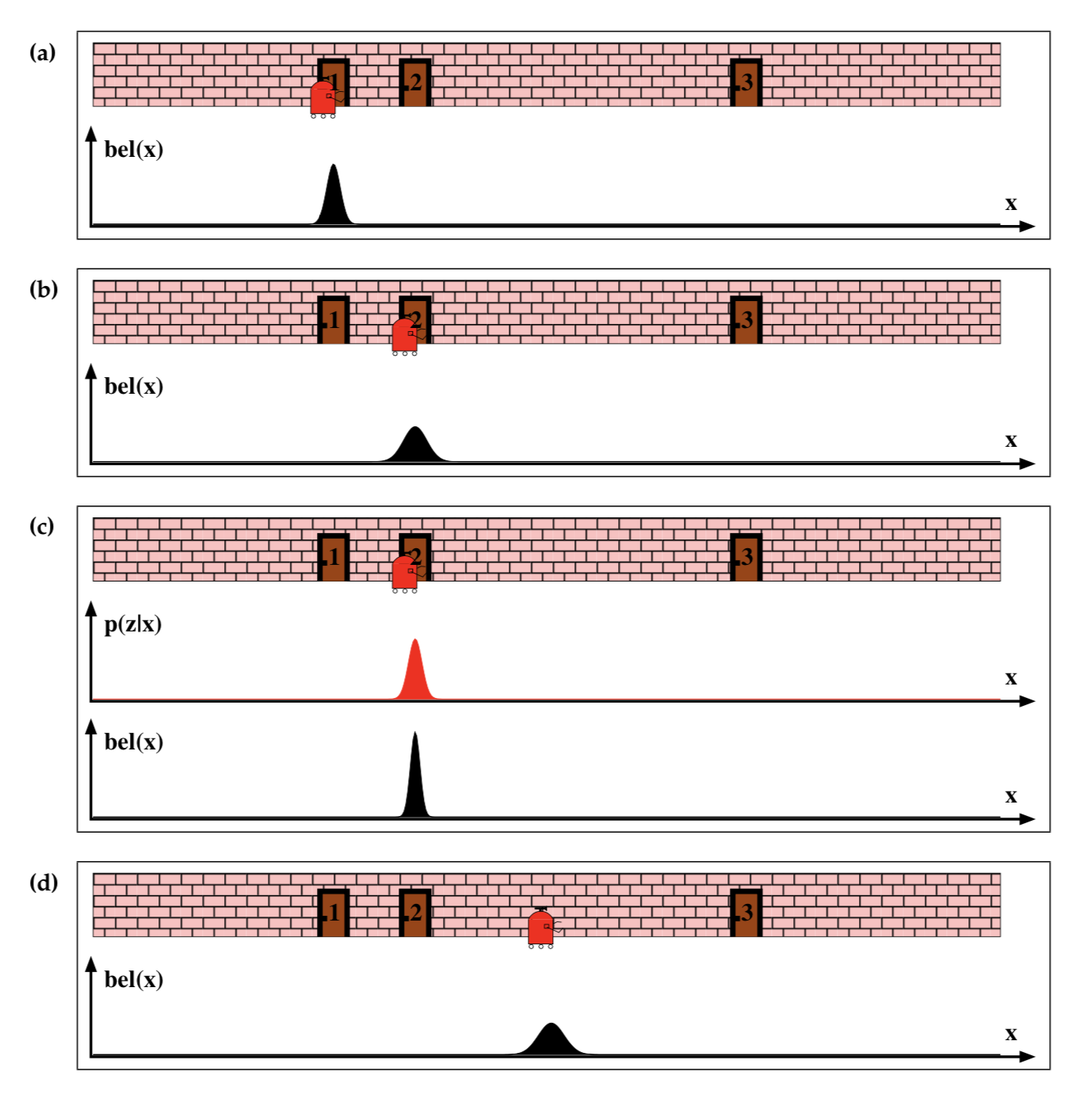
Source: Thrun, 2005 - Probabilistic Robotics
At time :
- t=1 , Initial belief represented by a Gaussian distribution around the first door.
- t=2 , Motion is updated and the new belief is represented by a shifted Gaussian of increased weight.
- t=3 , Measurement is updated and the robot is more certain of its location. The new posterior is represented by a Gaussian with a small variance.
- t=4 , Motion is updated and the uncertainty increases.
SOLUTION:
- Gaussian distribution
- Motion and measurement stages
SOLUTION:
- MCL